聊聊碰撞时间TTC
TTC碰撞时间(TTC是专门针对CIPV,本车会撞上前车的时间)
Mobileye的后装产品里面,FCW的时间设的是2.7秒
根据科学的统计,当提前2.5秒给予一个车辆警告的话
人的反应时间和刹车的距离,基本上可以做到车子刹停下来
Mobileye的后装产品(客户以商用车为主)会把这个预值再放大一点,保证司机有足够长的时间把车辆刹停下来
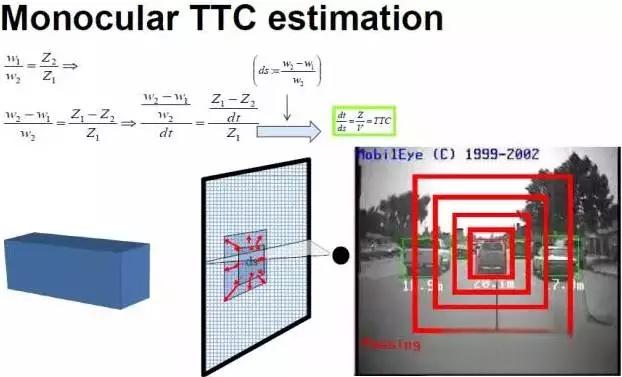
逻辑上处理算法获取图像,根据图在视野里面的变化的快慢,可计算出这辆车会碰撞的时间做距离的检测,包括之前更多的是用雷达的手段来做FCW,或者AEB的时候,其实也都是先做了距离的检测,然后再来算出碰撞的时间单目的摄像头的计算方式就是直接计算TTC跟车辆的车速线是直接对接的(知道本车的速度),可反算出来这个距离是多少输出TTC这个值,因为这个值才是最终用来做预警或者控制的最有用的一个参数
处理算法获取图像,根据图在视野里面的变化的快慢,可计算出这辆车会碰撞的时间
做距离的检测,包括之前更多的是用雷达的手段来做FCW,或者AEB的时候,其实也都是先做了距离的检测,然后再来算出碰撞的时间
单目的摄像头的计算方式就是直接计算TTC
跟车辆的车速线是直接对接的(知道本车的速度),可反算出来这个距离是多少
输出TTC这个值,因为这个值才是最终用来做预警或者控制的最有用的一个参数
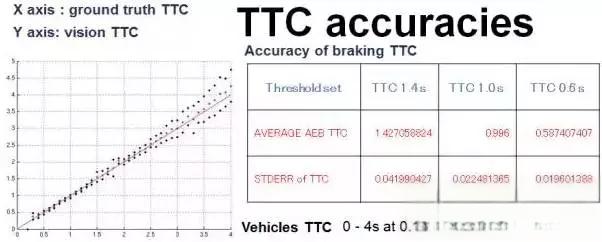
横轴是真正的TTC,纵轴是用vision检测出来的TTC
在TTC2秒~2.5秒的范围内,视觉算法检测出TTC和真实的TTC之间是非常的精准的,只有当距离远了之后TTC才会产生一定的偏差
AEB一般起作用都是在1秒上下的区间里面起作用,在这个时候我们的TTC已经可以做到非常精准
当把TTC设在1.4、1.0和0.6的时候,我们AEB的TTC和实际要求的预值之间的精准度是非常非常高的
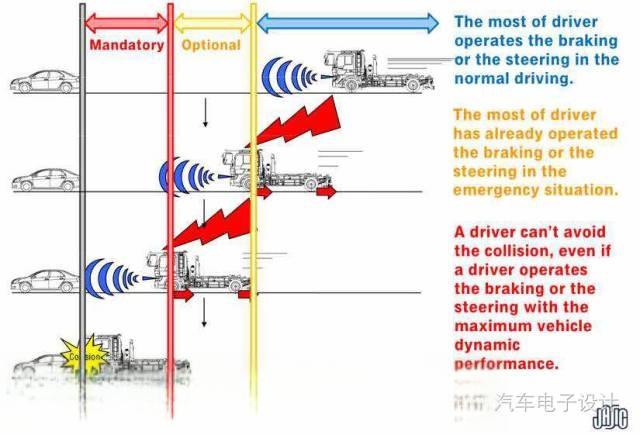
在整个过程里面从FCW到AEB是一个过程
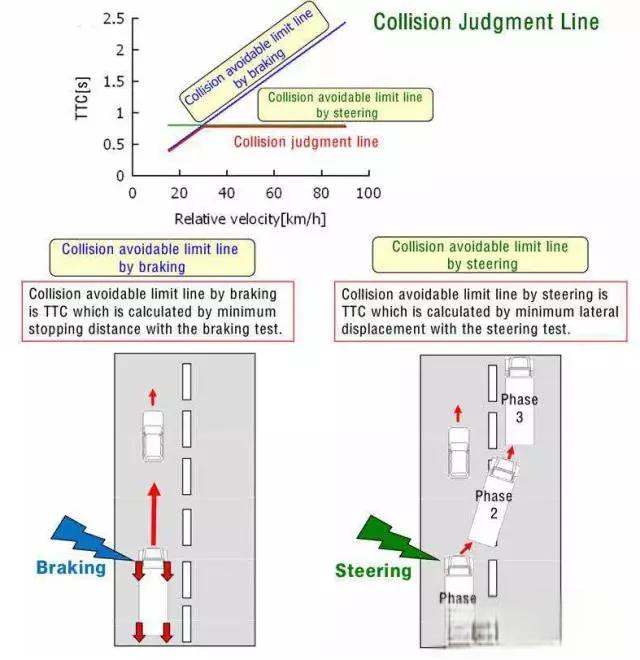
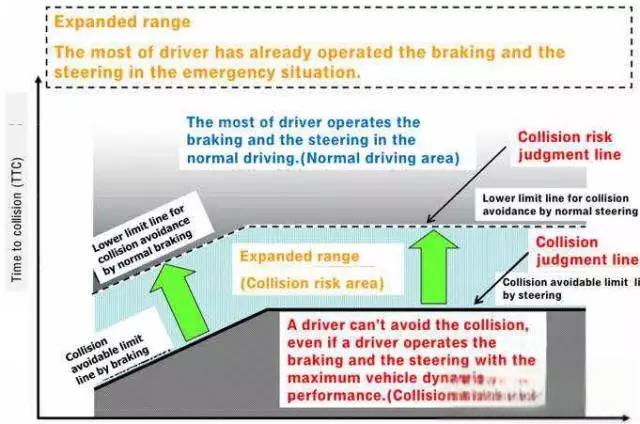
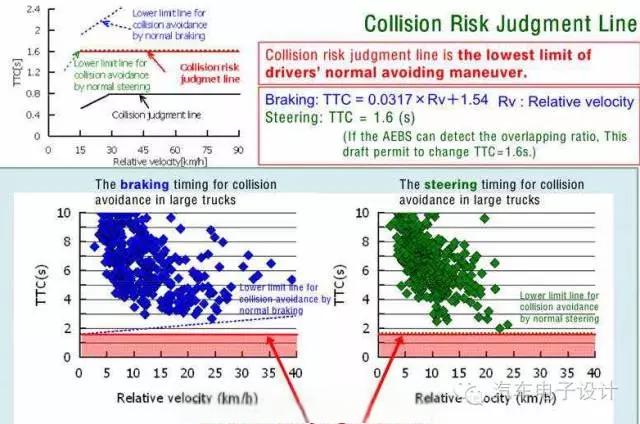
在不同的速度区间下,都有个最低的时间,我们根据这个画一根线,对司机来说,到时候就有两个决策通过制动解决问题通过拐出去:经过很多次的货车侧翻和教训,相信现在大量的司机都是不打方向,宁可往前撞的备注:侧撞除外
通过制动解决问题
通过拐出去:经过很多次的货车侧翻和教训,相信现在大量的司机都是不打方向,宁可往前撞的
备注:侧撞除外
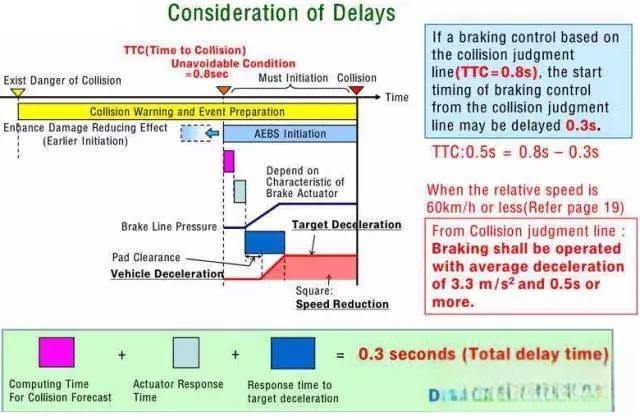
以刹车为主轴,我们可以分解整个时间线FCW的开始时间驾驶员意识到的时间驾驶员意识到没动作(刹车)的时间AEB的启动时间感知计算传递刹车执行器(由刹车类型决定)后面一体化的比较有趣了开始减速减速过程
以刹车为主轴,我们可以分解整个时间线
FCW的开始时间
驾驶员意识到的时间
驾驶员意识到没动作(刹车)的时间
AEB的启动时间
感知计算传递
刹车执行器(由刹车类型决定)
后面一体化的比较有趣了
开始减速
减速过程
这个上面所说的2.7秒,看来就是M公司所得出来正常驾驶员所能接受的TTC设计过长,可能会让开车有侵略性的受不了TTC设计过短,则让司机觉得FCW无用
这个上面所说的2.7秒,看来就是M公司所得出来正常驾驶员所能接受的
TTC设计过长,可能会让开车有侵略性的受不了
TTC设计过短,则让司机觉得FCW无用
这里就需要运用大量数据和统计的事来了,我相信这个2.7秒是个抽象的值,实际上是个函数
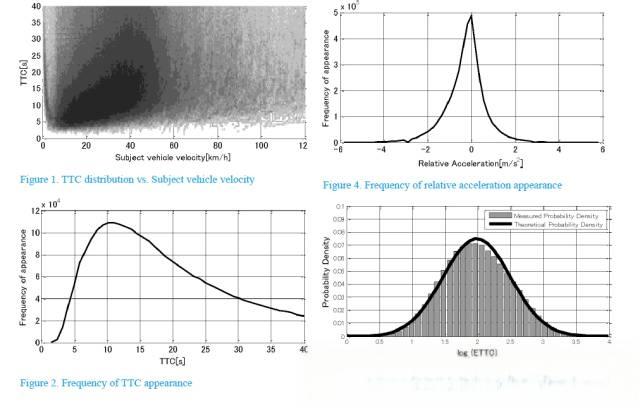
根据Toyota在《StudyonTTCDistributionwhenApproachingaLeadVehicle》一文里面多样的数据,我觉得确实乘用车和商用车差异较大,具体在实施过程中,可能具有很大的差距,是需要考虑驾驶员的行为和接受度的。细节还需要对比更多的数据来对实际的设置有相应的考虑,可能以后自己还能调节这个Profile呢,或者进行更深度的学习。
小结:1)主动安全,比我们想象的单个ECU和感知系统的事要复杂得多,因为牵涉了很多驾驶行为(人)和道路&环境(路),变量是比较多的。2)以后这块的数据,是比较值钱的。
1)主动安全,比我们想象的单个ECU和感知系统的事要复杂得多,因为牵涉了很多驾驶行为(人)和道路&环境(路),变量是比较多的。
2)以后这块的数据,是比较值钱的。